La réduction de la consommation de la sonde est obtenue en minimisant les périodes d’alimentation de la sonde.
Le démarrage de la sonde est temporisé par un circuit de faible consommation qui impose l’intervalle de temps s’écoulant entre deux mesures de température. Dans notre exemple, la temporisation est de 45 secondes.
La température ambiante est mesurée à la mise sous tension. Ensuite, le module RF transmet la mesure par radio. Ceci étant fait, la sonde envoie un signal de réinitialisation au circuit de temporisation Ce qui conduit à la coupure de l’alimentation de la sonde et le redémarrage du processus de temporisation.
La figure ci-dessous présente le schéma électronique du prototype.
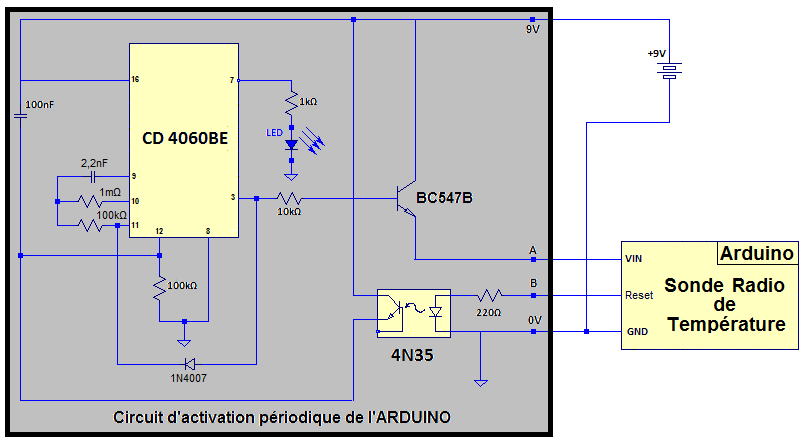
La partie gauche du schéma encadrée d’une ligne noire, circuit de temporisation, a été montée sur une plaque à bande pour en faire un module séparé réutilisable pour d’autres montages.
A cette fin, le module a été pourvu d’un connecteur, barrette mâle coudée à 4 broches (0v, 9v, A, B), enfichable sur une plaque d’expérimentation sans soudure ou sur tout autre circuit pourvu d’un connecteur femelle adéquat.
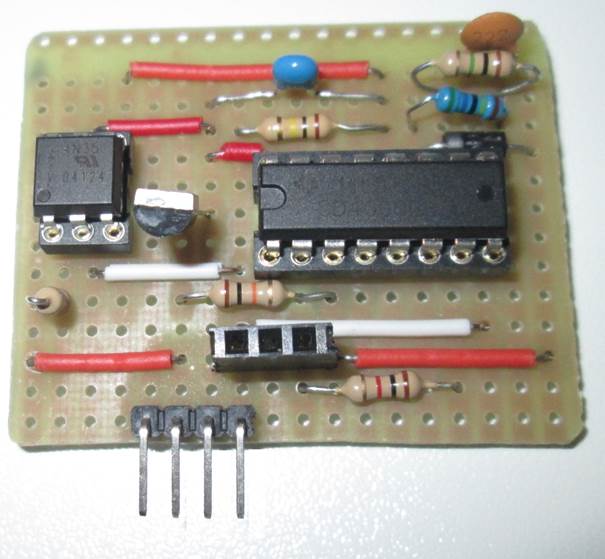
Les schémas recto et verso dudit module sont présentés ci-dessous

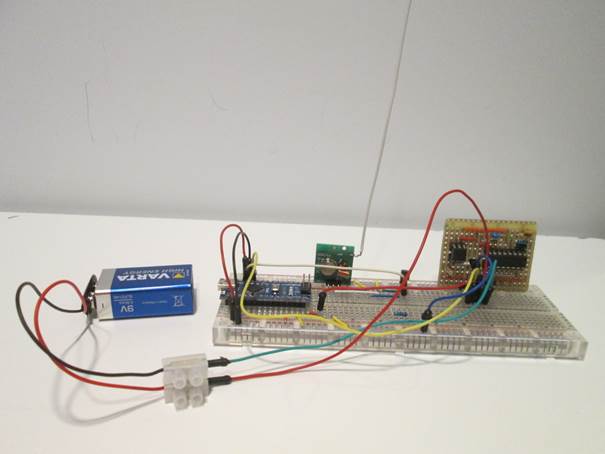
La sonde proprement dite est une variante de celle décrite dans l’article Arduino : cheap rf433 temperature sensor (Oregon 2.1 compatible).
Pour l’essentiel, d’un point de vue électronique, le port D8 de la sonde Arduino nano a été relié à la broche B du circuit pour que celle-ci puisse commander la réinitialisation du circuit en portant ledit port à 5v.
Vu que les transmissions successives des mesures ne se font plus dans la boucle sans fin du programme, les fonctionnalités se trouvant dans la procédure loop() ont été transférées dans celle de setup() se terminant à présent par une instruction portant le signal sur le port 8 à 5v provoquant la réinitialisation du circuit de temporisation et, de ce fait, la coupure de l’alimentation de la sonde.
Le code du programme est présenté ci-dessous.
* connectingStuff, Oregon Scientific v2.1 Emitter
* http://connectingstuff.net/blog/encodage-protocoles-oregon-scientific-sur-arduino/
*
* Copyright (C) 2013 olivier.lebrun@gmail.com
*
* This program is free software; you can redistribute it and/or
* modify it under the terms of the GNU General Public License
* as published by the Free Software Foundation; either version 2
* of the License, or (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301, USA.
*/
/*
* Programmme modifié le 3 février 2017 par Claude Glowacki
*
*/
#include « LowPower.h »
#include
#define DS18B20 0x28 // Adresse 1-Wire du DS18B20
#define BROCHE_ONEWIRE 10 // Broche utilisée pour le bus 1-Wire
OneWire ds(BROCHE_ONEWIRE); // Création de l’objet OneWire ds
#define THN132N
const byte TX_PIN = 3;
const unsigned long TIME = 512;
const unsigned long TWOTIME = TIME*2;
#define SEND_HIGH() digitalWrite(TX_PIN, HIGH)
#define SEND_LOW() digitalWrite(TX_PIN, LOW)
// Buffer for Oregon message
#ifdef THN132N
byte OregonMessageBuffer[8];
#else
byte OregonMessageBuffer[9];
#endif
/**
* \brief Send logical « 0 » over RF
* \details azero bit be represented by an off-to-on transition
* \ of the RF signal at the middle of a clock period.
* \ Remenber, the Oregon v2.1 protocol add an inverted bit first
*/
inline void sendZero(void)
{
SEND_HIGH();
delayMicroseconds(TIME);
SEND_LOW();
delayMicroseconds(TWOTIME);
SEND_HIGH();
delayMicroseconds(TIME);
}
/**
* \brief Send logical « 1 » over RF
* \details a one bit be represented by an on-to-off transition
* \ of the RF signal at the middle of a clock period.
* \ Remenber, the Oregon v2.1 protocol add an inverted bit first
*/
inline void sendOne(void)
{
SEND_LOW();
delayMicroseconds(TIME);
SEND_HIGH();
delayMicroseconds(TWOTIME);
SEND_LOW();
delayMicroseconds(TIME);
}
/**
* Send a bits quarter (4 bits = MSB from 8 bits value) over RF
*
* @param data Source data to process and sent
*/
/**
* \brief Send a bits quarter (4 bits = MSB from 8 bits value) over RF
* \param data Data to send
*/
inline void sendQuarterMSB(const byte data)
{
(bitRead(data, 4)) ? sendOne() : sendZero();
(bitRead(data, 5)) ? sendOne() : sendZero();
(bitRead(data, 6)) ? sendOne() : sendZero();
(bitRead(data, 7)) ? sendOne() : sendZero();
}
/**
* \brief Send a bits quarter (4 bits = LSB from 8 bits value) over RF
* \param data Data to send
*/
inline void sendQuarterLSB(const byte data)
{
(bitRead(data, 0)) ? sendOne() : sendZero();
(bitRead(data, 1)) ? sendOne() : sendZero();
(bitRead(data, 2)) ? sendOne() : sendZero();
(bitRead(data, 3)) ? sendOne() : sendZero();
}
/******************************************************************/
/******************************************************************/
/******************************************************************/
/**
* \brief Send a buffer over RF
* \param data Data to send
* \param size size of data to send
*/
void sendData(byte *data, byte size)
{
for(byte i = 0; i < size; ++i)
{
sendQuarterLSB(data[i]);
sendQuarterMSB(data[i]);
}
}
/**
* \brief Send an Oregon message
* \param data The Oregon message
*/
void sendOregon(byte *data, byte size)
{
sendPreamble();
//sendSync();
sendData(data, size);
sendPostamble();
}
/**
* \brief Send preamble
* \details The preamble consists of 16 "1" bits
*/
inline void sendPreamble(void)
{
byte PREAMBLE[]={0xFF,0xFF};
sendData(PREAMBLE, 2);
}
/**
* \brief Send postamble
* \details The postamble consists of 8 "0" bits
*/
inline void sendPostamble(void)
{
#ifdef THN132N
sendQuarterLSB(0x00);
#else
byte POSTAMBLE[]={0x00};
sendData(POSTAMBLE, 1);
#endif
}
/**
* \brief Send sync nibble
* \details The sync is 0xA. It is not use in this version since the sync nibble
* \ is include in the Oregon message to send.
*/
inline void sendSync(void)
{
sendQuarterLSB(0xA);
}
/******************************************************************/
/******************************************************************/
/******************************************************************/
/**
* \brief Set the sensor type
* \param data Oregon message
* \param type Sensor type
*/
inline void setType(byte *data, byte* type)
{
data[0] = type[0];
data[1] = type[1];
}
/**
* \brief Set the sensor channel
* \param data Oregon message
* \param channel Sensor channel (0x10, 0x20, 0x30)
*/
inline void setChannel(byte *data, byte channel)
{
data[2] = channel;
}
/**
* \brief Set the sensor ID
* \param data Oregon message
* \param ID Sensor unique ID
*/
inline void setId(byte *data, byte ID)
{
data[3] = ID;
}
/**
* \brief Set the sensor battery level
* \param data Oregon message
* \param level Battery level (0 = low, 1 = high)
*/
void setBatteryLevel(byte *data, byte level)
{
if(!level) data[4] = 0x0C;
else data[4] = 0x00;
}
/**
* \brief Set the sensor temperature
* \param data Oregon message
* \param temp the temperature
*/
void setTemperature(byte *data, float temp)
{
// Set temperature sign
if(temp < 0)
{
data[6] = 0x08;
temp *= -1;
}
else
{
data[6] = 0x00;
}
// Determine decimal and float part
int tempInt = (int)temp;
int td = (int)(tempInt / 10);
int tf = (int)round((float)((float)tempInt/10 – (float)td) * 10);
int tempFloat = (int)round((float)(temp – (float)tempInt) * 10);
// Set temperature decimal part
data[5] = (td << 4);
data[5] |= tf;
// Set temperature float part
data[4] |= (tempFloat << 4);
}
/**
* \brief Set the sensor humidity
* \param data Oregon message
* \param hum the humidity
*/
void setHumidity(byte* data, byte hum)
{
data[7] = (hum/10);
data[6] |= (hum – data[7]*10) << 4;
}
/**
* \brief Sum data for checksum
* \param count number of bit to sum
* \param data Oregon message
*/
int Sum(byte count, const byte* data)
{
int s = 0;
for(byte i = 0; i> 4;
s += (data[i]&0xF);
}
if(int(count) != count)
s += (data[count]&0xF0) >> 4;
return s;
}
/**
* \brief Calculate checksum
* \param data Oregon message
*/
void calculateAndSetChecksum(byte* data)
{
#ifdef THN132N
int s = ((Sum(6, data) + (data[6]&0xF) – 0xa) & 0xff);
data[6] |= (s&0x0F) <> 4;
#else
data[8] = ((Sum(8, data) – 0xa) & 0xFF);
#endif
}
/******************************************************************/
/******************************************************************/
// Fonction récupérant la température depuis le DS18B20
// Retourne true si tout va bien, ou false en cas d’erreur
boolean getTemperature(float *temp){
byte data[9], addr[8];
// data : Données lues depuis le scratchpad
// addr : adresse du module 1-Wire détecté
if (!ds.search(addr)) { // Recherche un module 1-Wire
ds.reset_search(); // Réinitialise la recherche de module
return false; // Retourne une erreur
}
if (OneWire::crc8(addr, 7) != addr[7]) // Vérifie que l’adresse a été correctement reçue
return false; // Si le message est corrompu on retourne une erreur
if (addr[0] != DS18B20) // Vérifie qu’il s’agit bien d’un DS18B20
return false; // Si ce n’est pas le cas on retourne une erreur
ds.reset(); // On reset le bus 1-Wire
ds.select(addr); // On sélectionne le DS18B20
ds.write(0x44, 1); // On lance une prise de mesure de température
delay(1000); // Et on attend la fin de la mesure
ds.reset(); // On reset le bus 1-Wire
ds.select(addr); // On sélectionne le DS18B20
ds.write(0xBE); // On envoie une demande de lecture du scratchpad
for (byte i = 0; i < 9; i++) // On lit le scratchpad
data[i] = ds.read(); // Et on stock les octets reçus
// Calcul de la température en degré Celsius
*temp = ((data[1] << 8) | data[0]) * 0.0625;
// Pas d'erreur
return true;
}
/******************************************************************/
void setup()
{
pinMode(8, OUTPUT); // Reset CD4060 port = 8
digitalWrite(8, LOW); //
pinMode(13, OUTPUT);
digitalWrite(13,LOW);
pinMode(TX_PIN, OUTPUT);
SEND_LOW();
#ifdef THN132N
// Create the Oregon message for a temperature only sensor (TNHN132N)
byte ID[] = {0xEA,0x4C};
#else
// Create the Oregon message for a temperature/humidity sensor (THGR2228N)
byte ID[] = {0x1A,0x2D};
#endif
setType(OregonMessageBuffer, ID);
setChannel(OregonMessageBuffer, 0x20);
setId(OregonMessageBuffer, 0xBD);
oneTime();
digitalWrite(8, HIGH); // turn the LED off by making the voltage LOW
}
void oneTime()
{
// Get Temperature, humidity and battery level from sensors
float temp;
if (getTemperature(&temp)) {
// (ie: 1wire DS18B20 for température, …)
setBatteryLevel(OregonMessageBuffer, 1); // 0 : low, 1 : high
setTemperature(OregonMessageBuffer, temp);
#ifndef THN132N
// Set Humidity
setHumidity(OregonMessageBuffer, 52);
#endif
// Calculate the checksum
calculateAndSetChecksum(OregonMessageBuffer);
// Send the Message over RF
sendOregon(OregonMessageBuffer, sizeof(OregonMessageBuffer));
// Send a "pause"
SEND_LOW();
delayMicroseconds(TWOTIME*8);
// Send a copie of the first message. The v2.1 protocol send the
// message two time
sendOregon(OregonMessageBuffer, sizeof(OregonMessageBuffer));
}
digitalWrite(8, HIGH); // turn the LED off by making the voltage LOW
}
void loop(){
LowPower.powerDown(SLEEP_8S, ADC_OFF, BOD_OFF);
}
Commentaires récents